A multirotor[1] or multicopter is a rotorcraft with more than two lift-generating rotors. An advantage of multirotor aircraft is the simpler rotor mechanics required for flight control. Unlike single- and double-rotor helicopters which use complex variable pitch rotors whose pitch varies as the blade rotates for flight stability and control, multirotors often use fixed-pitch blades; control of vehicle motion is achieved by varying the relative speed of each rotor to change the thrust and torque produced by each.

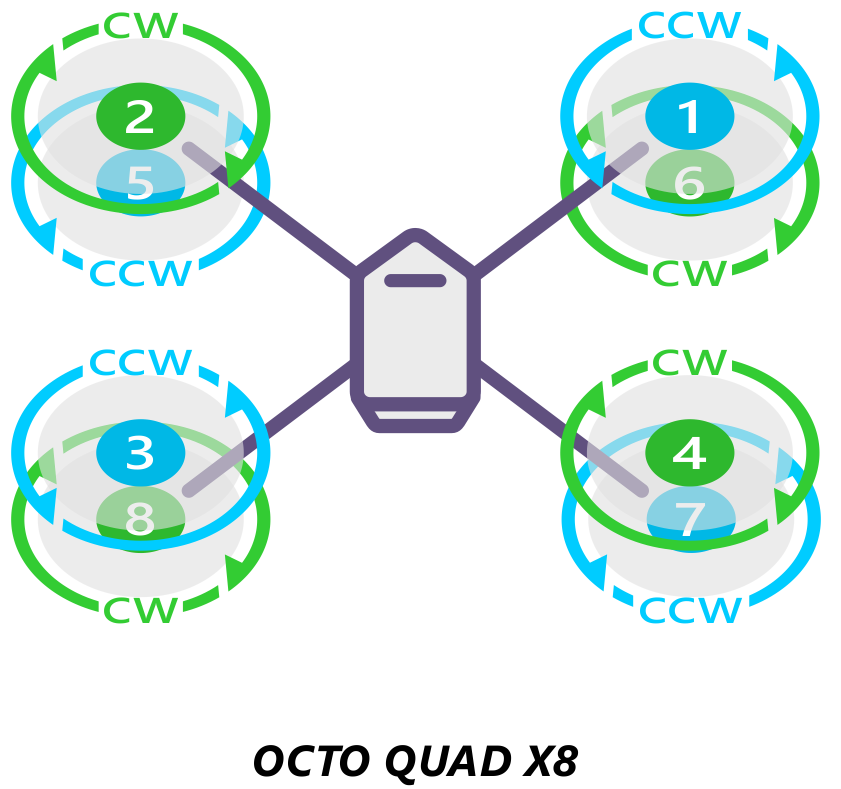
Due to their ease of both construction and control, multirotor aircraft are frequently used in radio control aircraft and unmanned aerial vehicle (UAV) (drone) projects[2][3][4][5][6][7] in which the names tricopter, quadcopter, hexacopter and octocopter are frequently used to refer to 3-, 4-, 6- and 8-rotor rotorcraft, respectively.[8] There is also the X8 (also called octo-quad) configuration that is similar to the quadracopter design, except that it has eight rotors; the lower of which have a reversed rotation direction.[9]

In order to allow more power and stability at reduced weight, coaxial rotors can be employed, in which each arm has two motors, running in opposite directions which cancels out rotational torque (one facing up and one facing down).[11]
Also possible is the addition of horizontal propellers[12][13][14] These types of rotorcraft (which have just 4 vertical propellers) are called quadplanes.[15]
Rotor configurations
editExamples
edit- de Bothezat helicopter - an American four-rotor helicopter that first flew on December 18, 1922.
- Cierva Air Horse - a British three-rotor "heavy lift" helicopter first flying in 1948. Three rotors were used to give a large lift without compromising rotor strength.[16]
- Volocopter designs - a series of German prototype electric multicopters with 18 rotors, the first electric multicopter in the world to achieve crewed flight.[17][18] The large number of low-cost motors make it economical, quiet and provide redundancy with ability to maintain control with up to four failed motors.[19]

References
edit- ^ Early in helicopter development,"multi-rotor" was used to refer to helicopters with two rotor assemblies
- ^ "AeroQuad - The Open Source Quadcopter". Archived from the original on 2012-01-03. Retrieved 2012-01-05.
- ^ "Multicopter Table". multicopter.org. Archived from the original on 6 November 2011. Retrieved 30 June 2015.
- ^ "FrontPage - UAVP-NG - The Open Source Next Generation Multicopter". uavp.ch. Retrieved 30 June 2015.
- ^ "FrontPage - UAVP-NG - The Open Source Next Generation Multicopter". uavp.ch. Retrieved 30 June 2015.
- ^ "DIY Drones". diydrones.com. Retrieved 30 June 2015.
- ^ OpenPilot Archived 2011-05-27 at the Wayback Machine Open source UAV autopilot for multirotors
- ^ "How to Pick The Best Multirotor Frame". My First Drone. Archived from the original on 3 April 2014. Retrieved 30 June 2015.
- ^ "Octo Quad". ardupilot.org. Retrieved 30 December 2019.
- ^ "ALMA Filmed with Hexacopter". ESO Announcement. Retrieved 6 September 2013.
- ^ "Multirotor Frame Configurations". Coptercraft. Retrieved 23 December 2015.
- ^ Vertical technologies DeltaQuad
- ^ "QuadRanger VTOL". Archived from the original on 2018-11-06. Retrieved 2018-04-29.
- ^ SkyProwler
- ^ Quadplane term
- ^ Flight 14 April 1949 p427
- ^ "German multicopter makes first manned flight". sUAS news. 1 November 2011. Retrieved 3 Nov 2011.
- ^ "Volocopter: 18-propeller electric helicopter takes flight". CNN news. 27 November 2013. Retrieved 2 Dec 2013.
- ^ "New Aircraft Arises from Germany". Sport Aviation: 14. January 2012.
{kind=link}
This article about aircraft components is a stub. You can help Wikipedia by expanding it. |